原创
机器学习入门
前几日正式开始了我的机器学习之旅,总结下目前已掌握的知识。
机器学习
机器学习本质是一项监督分类/回归问题,"监督"表示你有许多样本,假设你知道这些样本的正确答案,我们不断地把样本交给机器,并告诉机器这些样本是正确或错误的,对机器进行训练,最终达到机器学习的目的。
监督学习
简单说:监督学习就是教会计算机去完成任务,如:根据你已经标记为垃圾邮件的邮件学习识别垃圾邮件,根据你喜欢的电影推荐其他你可能喜欢的电影...
监督学习可以理解为以下两种模型:
- 回归模型 即:根据之前的数据预测出一个准确的输出值
回归问题通常是用来预测一个值,如预测房价、未来的天气情况等等,例如一个产品的实际价格为500元,通过回归分析预测值为499元,我们认为这是一个比较好的回归分析。 一个比较常见的回归算法是线性回归算法(LR)。另外,回归分析用在神经网络上,其最上层是不需要加上softmax函数的,而是直接对前一层累加即可。回归是对真实值的一种逼近预测。
- 分类模型 即:根据之前的数据和分类/标签将输入数据准确地进行分类
分类问题是用于将事物打上一个标签,通常结果为离散值。例如判断一幅图片上的动物是一只猫还是一只狗,分类通常是建立在回归之上,分类的最后一层通常要使用softmax函数进行判断其所属类别。 分类并没有逼近的概念,最终正确结果只有一个,错误的就是错误的,不会有相近的概念。最常见的分类方法是逻辑回归,或者叫逻辑分类。
分类模型和回归模型本质一样,分类模型可将回归模型的输出离散化,回归模型也可将分类模型的输出连续化。
两者的区别在于输出变量的类型。
- 定量输出称为回归,或者说是连续变量预测;
- 定性输出称为分类,或者说是离散变量预测。
举个例子:
- 预测明天的气温是多少度,这是一个回归任务;
- 预测明天是阴、晴还是雨,就是一个分类任务。
无监督学习
无监督学习中,我们将让计算机自己进行学习。
无监督学习(也有人叫非监督学习,反正都差不多)是另一种研究的比较多的学习方法,它与监督学习的不同之处,在于我们事先没有任何训练样本,而需要直接对数据进行建模。 这听起来似乎有点不可思议,但是在我们自身认识世界的过程中很多处都用到了无监督学习。
比如我们去参观一个画展,我们完全对艺术一无所知,但是欣赏完多幅作品之后,我们也能把它们分成不同的派别(比如哪些更朦胧一点,哪些更写实一些,即使我们不知道什么叫做朦胧派,什么叫做写实派,但是至少我们能把他们分为两个类)。
无监督学习里典型的例子就是聚类了。聚类的目的在于把相似的东西聚在一起,而我们并不关心这一类是什么。因此,一个聚类算法通常只需要知道如何计算相似度就可以开始工作了。
更多关于无监督学习将在今后的进阶文章中整理。
两者的区别
机器的整个学习的过程非常像人类的学习习惯,人类通过观察很多示例来进行学习,计算机进行机器学习也是如此,你给他提供很多示例,计算机分析发生了什么并学习,而这个分析学习的过程便是机器学习要解决的核心问题。
下小节摘自 知乎 - 什么是无监督学习? - 王丰的回答 :
是否有监督(supervised),就看输入数据是否有标签(label)。输入数据有标签,则为有监督学习,没标签则为无监督学习。
首先看什么是学习(learning)?
一个成语就可概括:举一反三。此处以高考为例,高考的题目在上考场前我们未必做过,但在高中三年我们做过很多很多题目,懂解题方法,因此考场上面对陌生问题也可以算出答案。
机器学习的思路也类似:我们能不能利用一些训练数据(已经做过的题),使机器能够利用它们(解题方法)分析未知数据(高考的题目)?
最简单也最普遍的一类机器学习算法就是分类(classification)。对于分类,输入的训练数据有特征(feature),有标签(label)。所谓的学习,其本质就是找到特征和标签间的关系(mapping)。 这样当有特征而无标签的未知数据输入时,我们就可以通过已有的关系得到未知数据标签。在上述的分类过程中,如果所有训练数据都有标签,则为有监督学习(supervised learning)。
如果数据没有标签,显然就是无监督学习(unsupervised learning)了,也即聚类(clustering)。 目前分类算法的效果还是不错的,但相对来讲,聚类算法就有些惨不忍睹了。确实,无监督学习本身的特点使其难以得到如分类一样近乎完美的结果。 这也正如我们在高中做题,答案(标签)是非常重要的,假设两个完全相同的人进入高中,一个正常学习,另一人做的所有题目都没有答案,那么想必第一个人高考会发挥更好,第二个人会发疯。 这时各位可能要问,既然分类如此之好,聚类如此之不靠谱,那为何我们还可以容忍聚类的存在? 因为在实际应用中,标签的获取常常需要极大的人工工作量,有时甚至非常困难。 例如在自然语言处理(NLP)中,Penn Chinese Treebank在2年里只完成了4000句话的标签……
这时有人可能会想,难道有监督学习和无监督学习就是非黑即白的关系吗?有没有灰呢?Good idea。
灰是存在的。二者的中间带就是半监督学习(semi-supervised learning)。对于半监督学习,其训练数据的一部分是有标签的,另一部分没有标签,而没标签数据的数量常常极大于有标签数据数量(这也是符合现实情况的)。 隐藏在半监督学习下的基本规律在于:数据的分布必然不是完全随机的,通过一些有标签数据的局部特征,以及更多没标签数据的整体分布,就可以得到可以接受甚至是非常好的分类结果。 (此处大量忽略细节)因此,learning家族的整体构造是这样的:
- 有监督学习(分类,回归)
- 半监督学习(分类,回归),transductive learning(分类,回归)
- 半监督聚类(有标签数据的标签不是确定的,类似于:肯定不是xxx,很可能是yyy)
- 无监督学习(聚类)
特征和标签
提取特征
看下面一张图:
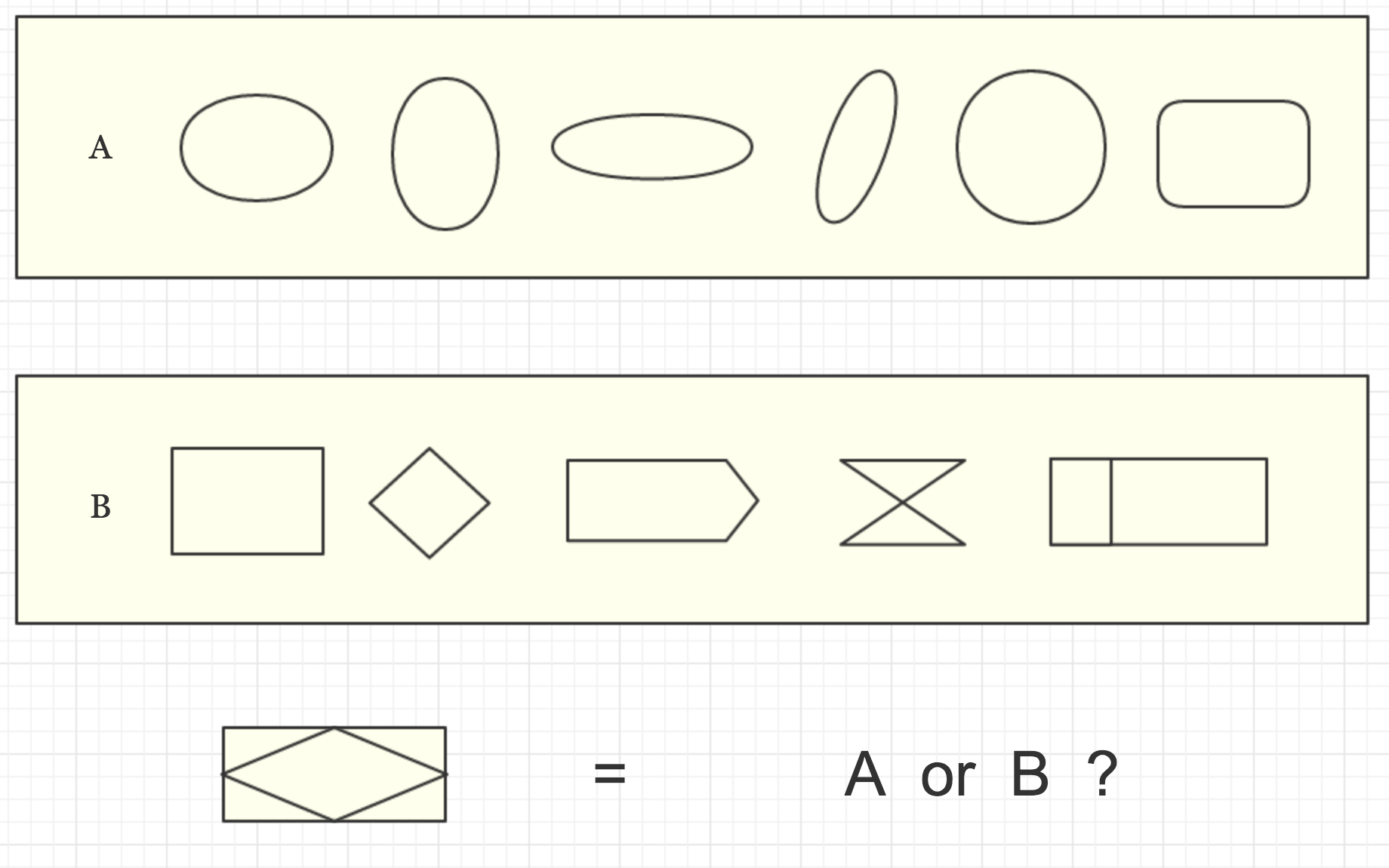
已知A集合中的所有元素和B集合中的所有元素,你认为上图最终元素应该属于A集合还是B集合?
答案是B集合。也许图中的实例数量不足以你进行准确判断(当然这个例子太容易判断啦),如果每个集合扩展到100个元素呢?
很显然,集合中元素的数量越多,我们能够发现出更多的特征,进而做出更准确的判断。
我们之所以能一眼将元素进行判定其属于B集合,是因为我们可以最快识别出元素的特征:角。
当我们大脑对元素的特征进行分析和判断后,大脑最终会一定会反馈出其中一个结果:
- 属于A集合
- 属于B集合
- 属于C集合(如果有的话...)
- ...
最终我们发现B集合的条件满足元素的特征,于是最终确认元素属于B集合。
在机器学习中,我们通常会把特征作为输入,然后尝试生成标签,最终进行分类。
散点图
在上文中,我们将图形的角数作为特征,然而在实际的问题中,我们可能需要提取完全不一样的特征。
如:如果我们需要实现一个音乐的智能推荐算法,我们首先需要根据用户已经喜欢的音乐中提取特征,这些特征可能是音乐对应的流派、声音性别、节奏强度、平均分贝值...
分析出特征后我们先尝试将特征数据可视化,接下来,我们使用一个散点图来表示上面音乐推荐的例子:
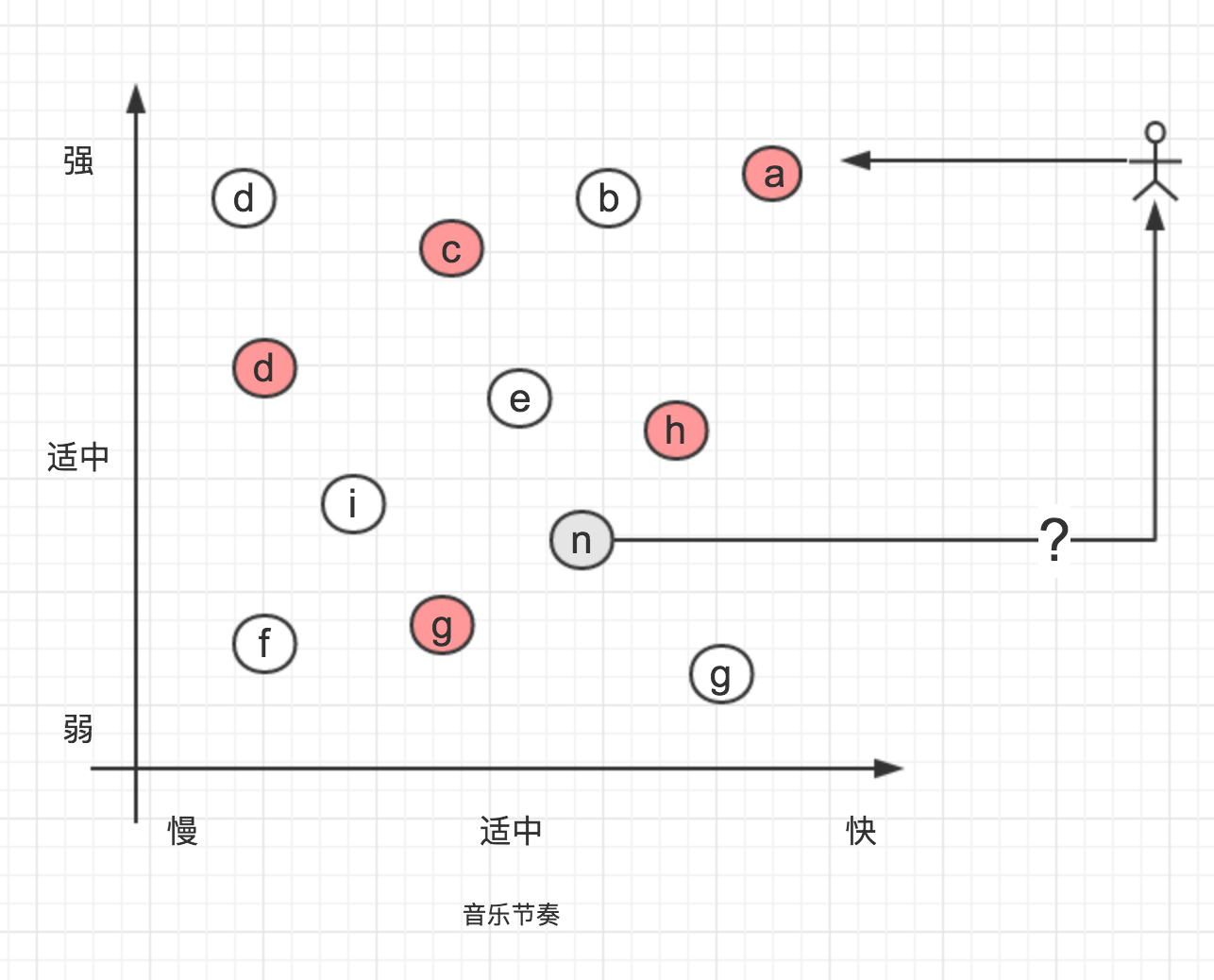
现在,假设Surmon😆喜欢一首音乐叫《天马座的幻想》,我们现在提取出这首音乐的一些特征,包括:强度、歌曲节奏、声音性别、歌曲流派..., 为了简化问题,我们图中在仅使用强度和节奏特征,如图:
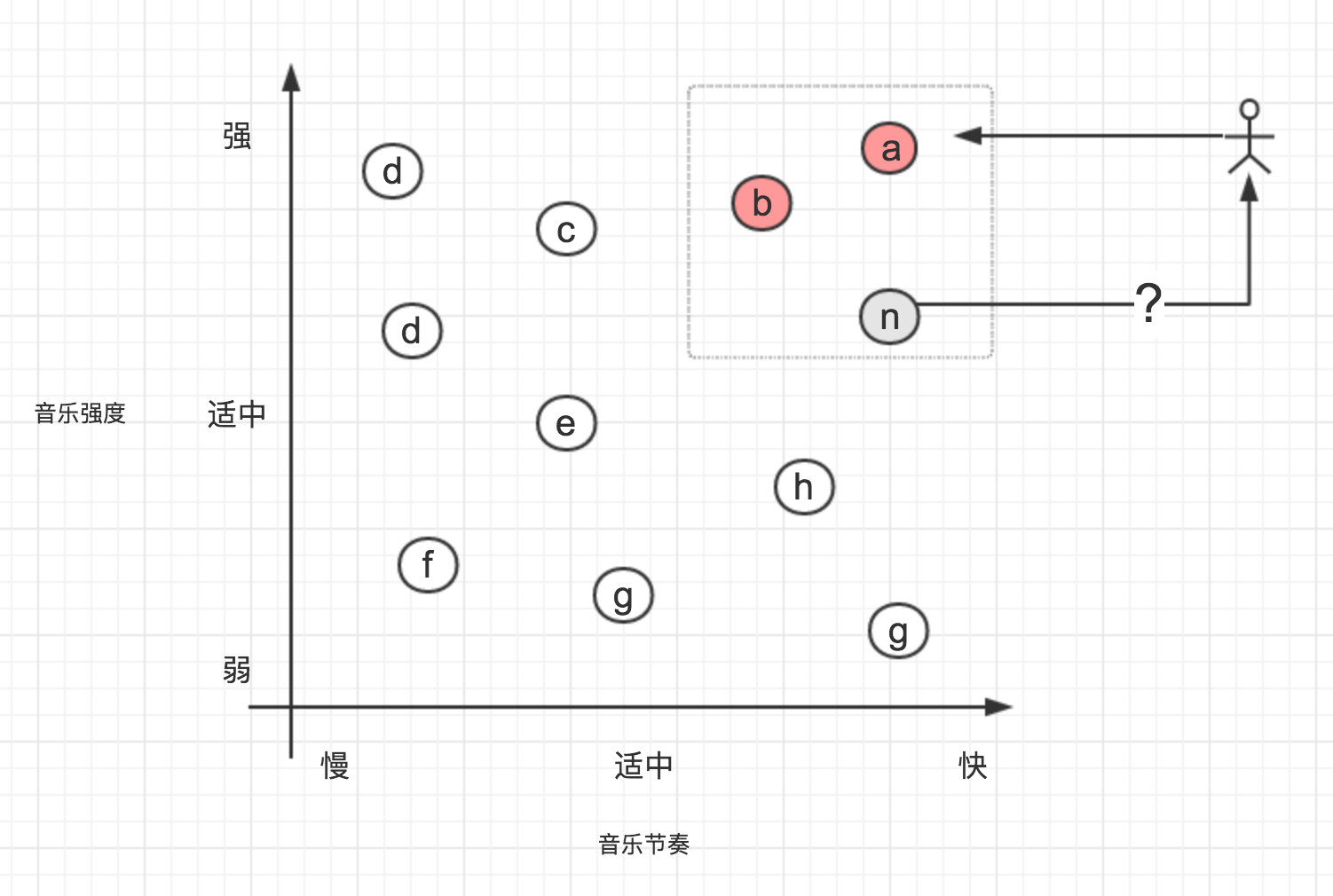
《天马座的幻想》这首音乐,节奏快,强度较高,我们在图中用a点表示; 同样的,我们可以提取其他音乐的这些特征,因此,每首音乐都变成了图中的一个数据点,图中的b、c、d...分别代表其他歌曲;
假设a、b两首音乐为Surmon喜欢的音乐(红色背景标注的),且Surmon不喜欢其他之外的音乐,你认为Surmon会喜欢推荐的音乐n吗?
答案是会喜欢,虽然无法完全确定,起码从图上来判断是的。
又有假设了:
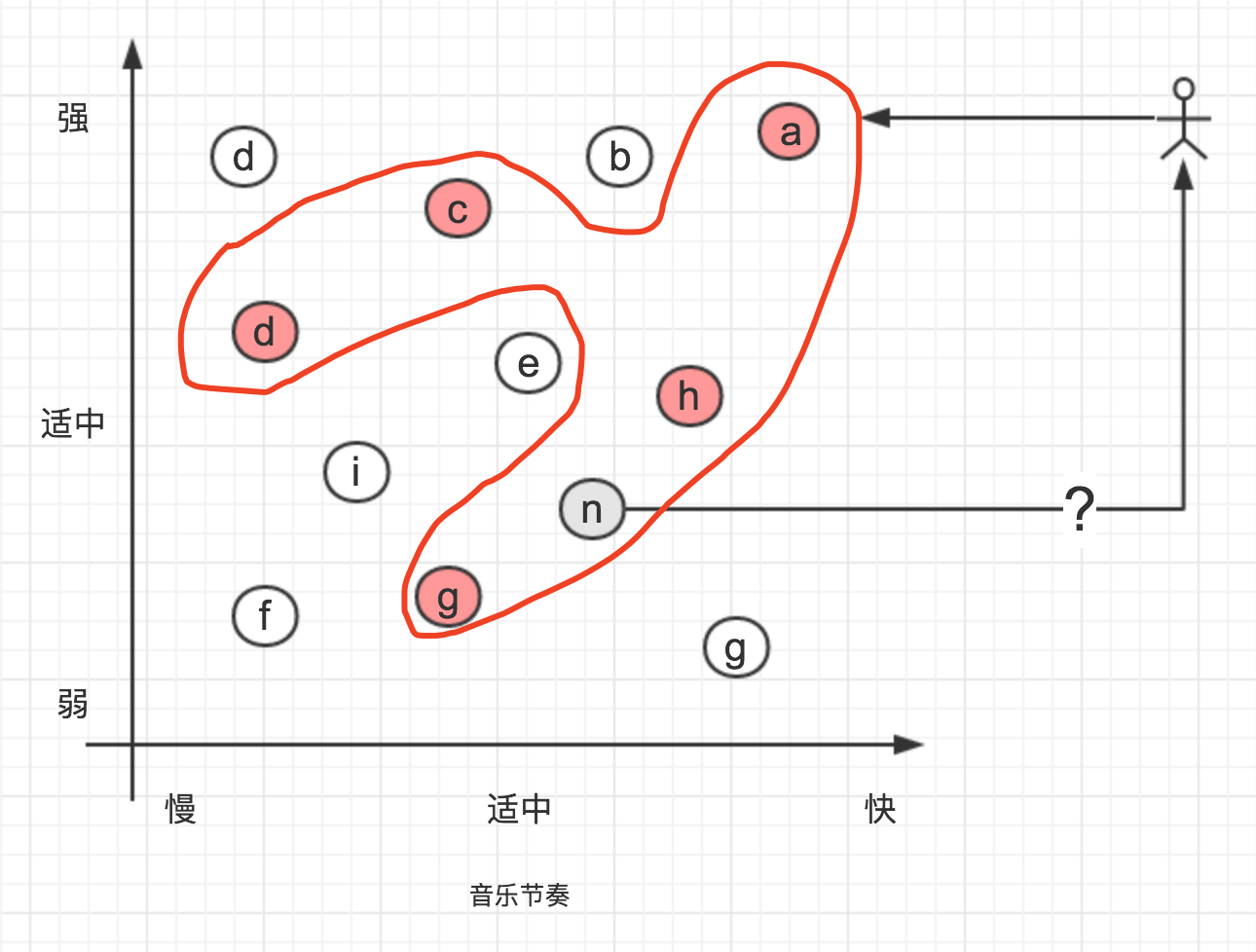
假设Surmon失恋了,又开始喜欢一些节奏比较温柔的轻音乐,于是现在Surmon现在喜欢的音乐数据是这样的,整体看来比较分散:
你认为Surmon会喜欢推荐的音乐n吗?
答案是不确定。
但实际上,应该存在一个模式,计算出Surmon喜欢的音乐的数据集,如下,推荐的音乐n可能被包含在Surmon喜欢的音乐的数据集中:
也有可能这首音乐不被包含在Surmon喜欢的音乐的数据集中:
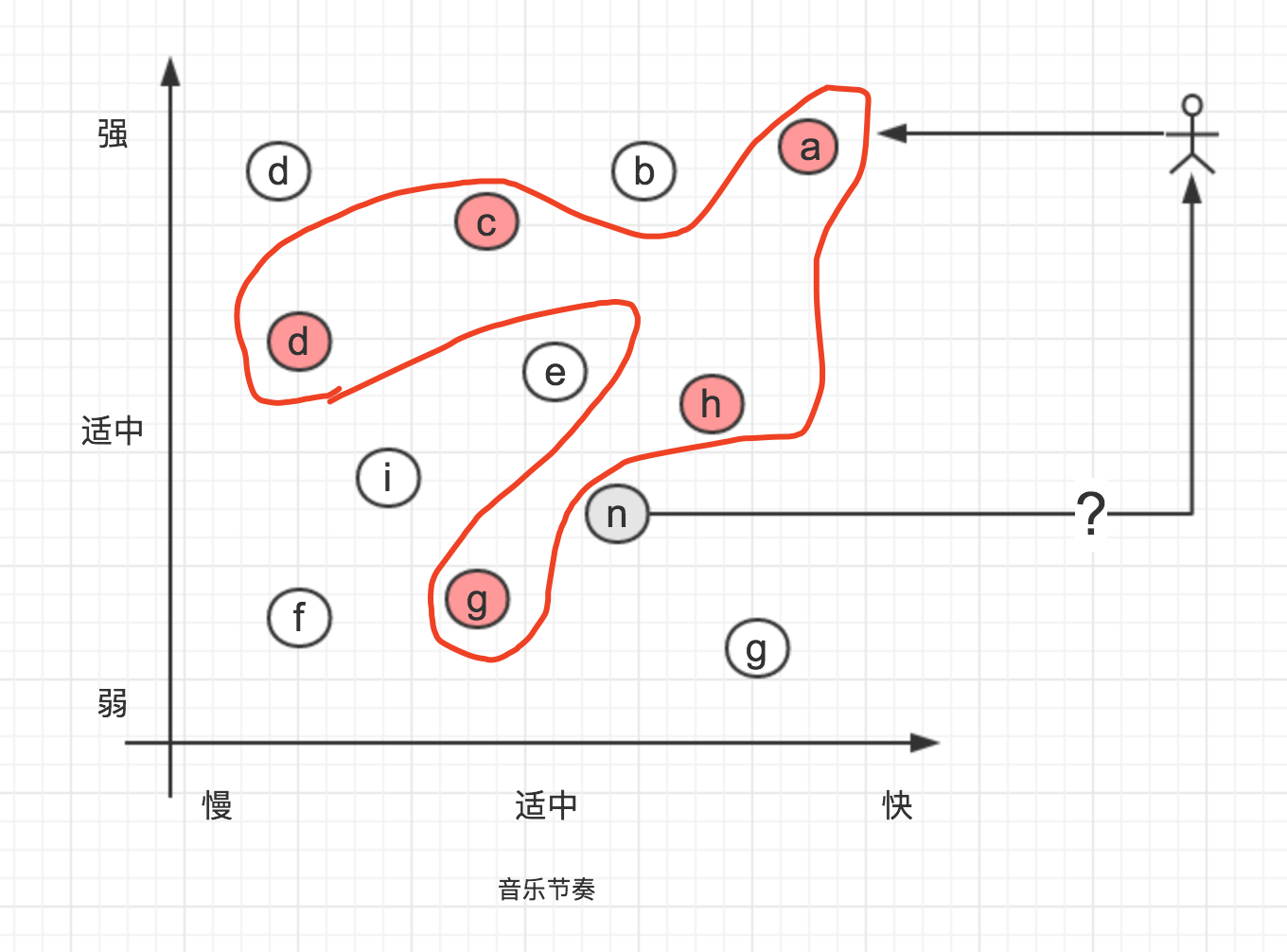
通过观察Surmon喜欢的音乐的数据集,我们便能得出相对准确的结果,即Surmon是否会喜欢这首音乐。
再来一个比较现实的例子:
假设我们在研究汽车的无人驾驶技术,我们需要机器判断出汽车当前面临的环境并作出对应的操作; 假设我们将汽车行驶的环境特征分为:路面平整度(1-3)、行驶坡度(3-6)两个维度,如下图;我们在散点图中以轴线呈现出来,同时将轴线简单分别分为三个维度,对应我们的特征,最终我们会得到9个点:
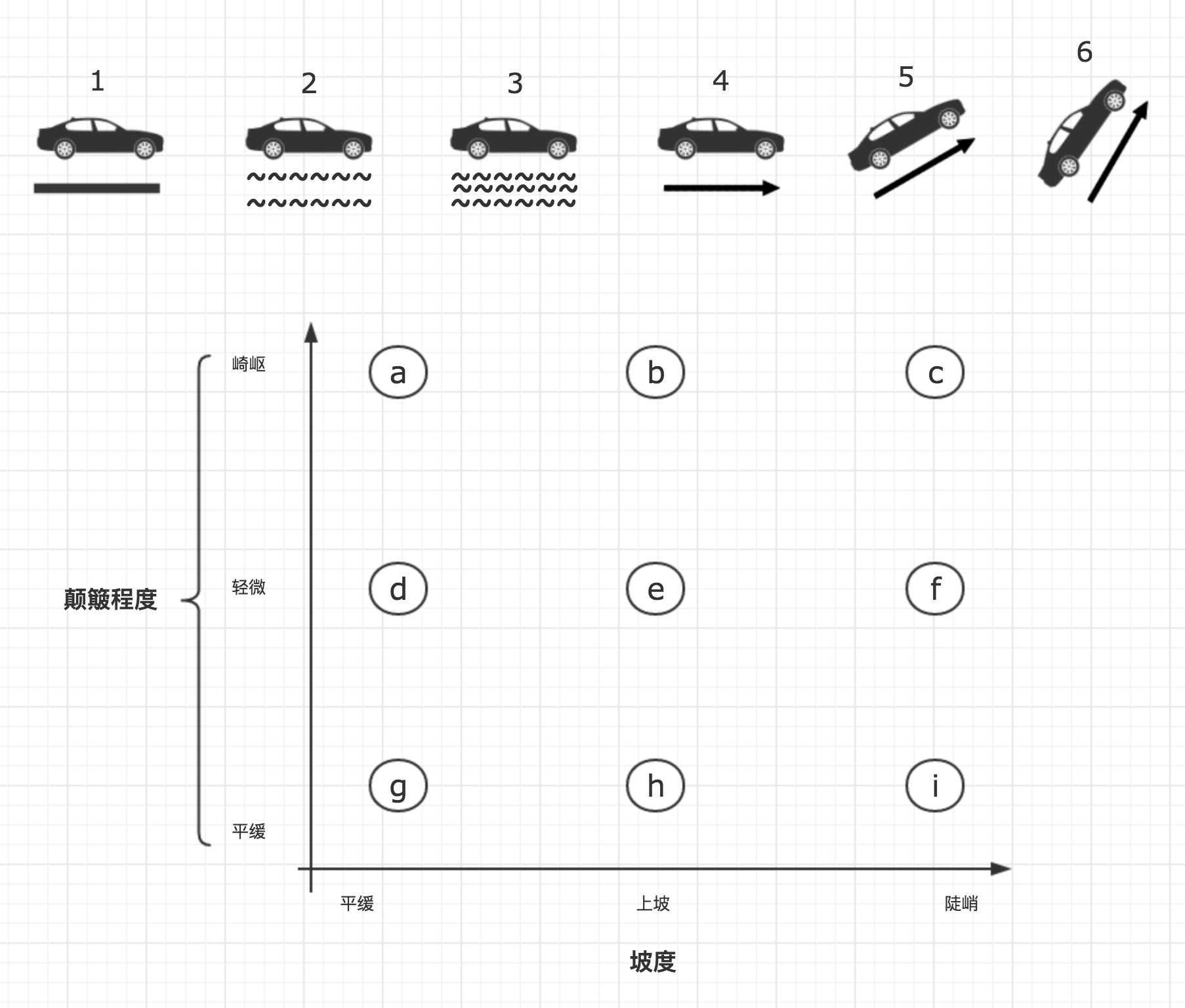
当前,事实上,这两个特征是可能同时发生的,故这9个点代表汽车可能遇到的崎岖程度和坡度所组成的所有特征组合,我们暂且称之为分类。
上图中,汽车在轻微上坡但路面较为平坦时(5号路况),对应h类。
Python scikit中的实现:
ipython
12345678
import numpy as np
from sklearn.naive_bayes import GaussianNB
roadFs = np.array([[1, 3], [2, 3], [3, 3], [1, 2], [2, 2], [3, 2], [1, 1], [2, 1], [3, 1]])
roadLs = np.array(['a', 'b', 'c', 'd', 'e', 'f', 'g', 'h', 'i'])
clf_car = GaussianNB()
clf_car.fit(roadFs, roadLs)
print(clf_car.predict([[1.2, 1.2], [2.8, 2.8]]))
>>> ['g' 'c']
决策面
机器学习就是将数据根据特征和标签转换为决策面(分类)。
如下图例:
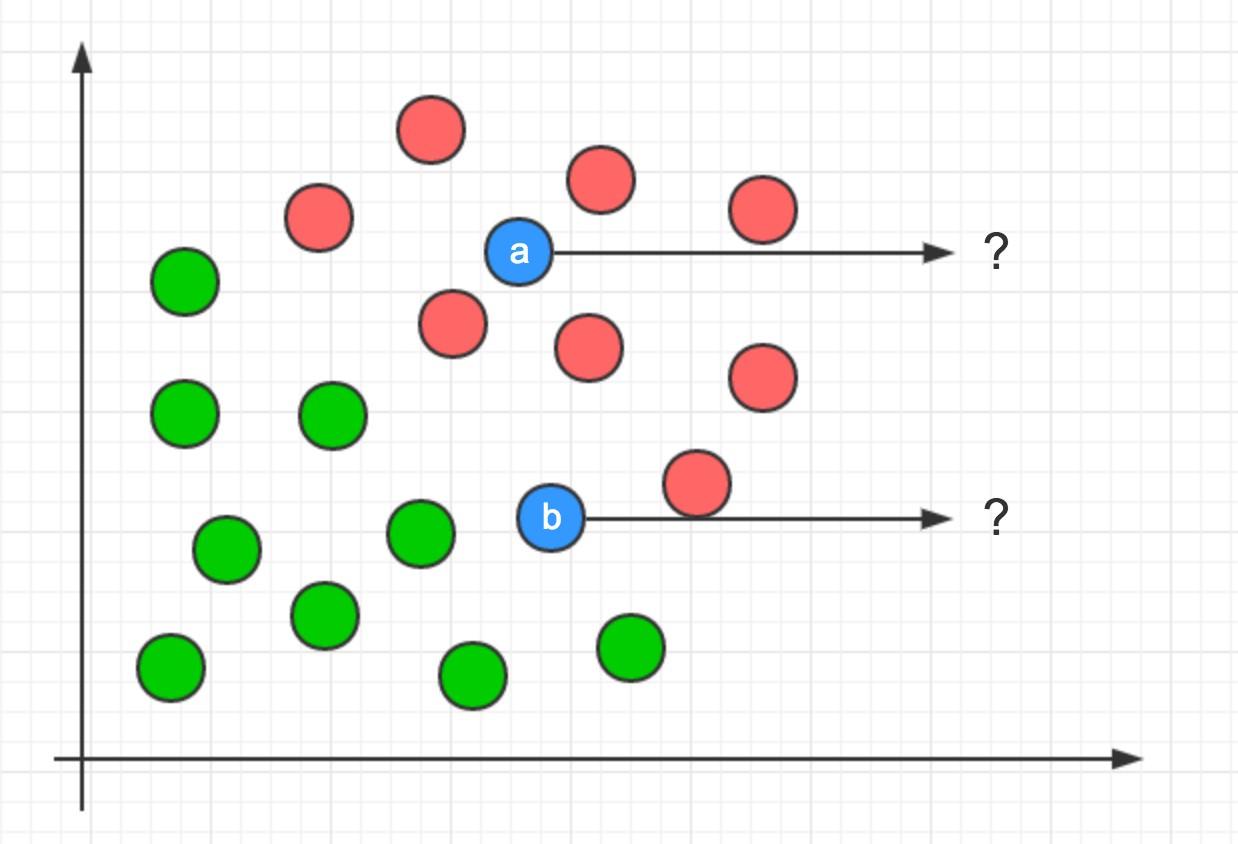
上图中所有数据用圆形标识,我们使用特征将数据分成了两类:红色和绿色,通过直觉判断,数据点a应该被归类于红色数据集,而数据点b显然无法判断。
机器学习能做什么,它可以为以上图例中的数据集决定决策面(分割数据集/分类)。
像这样,它可以计算出一个决策面,决策面左侧即数据绿色数据,右侧反之。
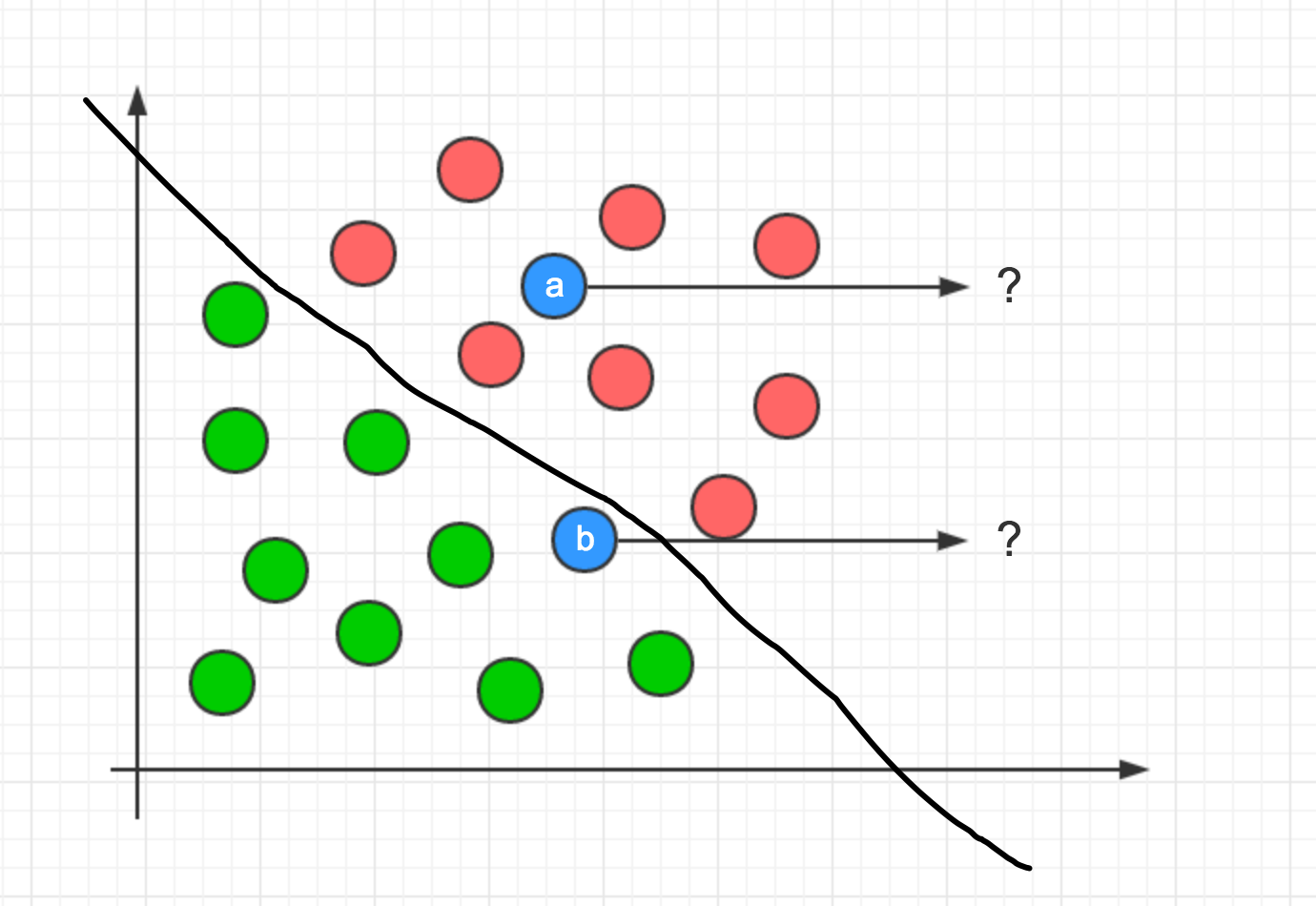
使用决策面,标记数据分类就简单多了。
决策面分为:
- 线层决策面:决策面为一条直线
- 非线性局侧面:决策面不是一条直线(一条直线无法决策的)
使用算法
常见的计算决策面的算法有:
- 朴素贝叶斯
- 支持向量机
- ...
其之间的不同和详细使用会在之后的文章推出。
基础库: scikit-learn 官网,scikit-learn是一个python学习算法库,包含了丰富的机器学习算法。
完





期待你的捷足先登